Устройство автомобиля в схемах |  |
| Понедельник, 06.05.2024, 10:05 | | RSS | ||
| |||
| Главная | Электроника в управлении трансмиссией и других механизмов | |||
|
Электроника в управлении трансмиссией Эксплуатационные свойства автомобиля во многом зависят от согласования характеристик трансмиссии и двигателя с учетом изменений сопротивления движению. Трансмиссия и движитель — это промежуточные звенья между двигателем и дорогой. Выбор оптимального передаточного отношения трансмиссии в зависимости от дорожного сопротивления (от нагрузки) позволяют осуществлять электронные системы управления. В качестве привода исполнительных механизмов используют устройства гидравлические, пневматические, электромагнитные или с электродвигателями.
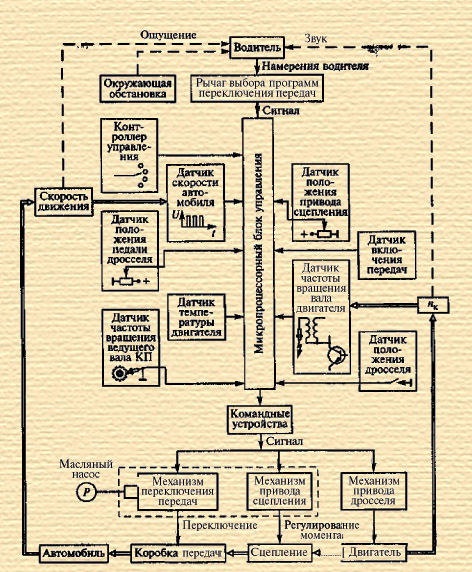
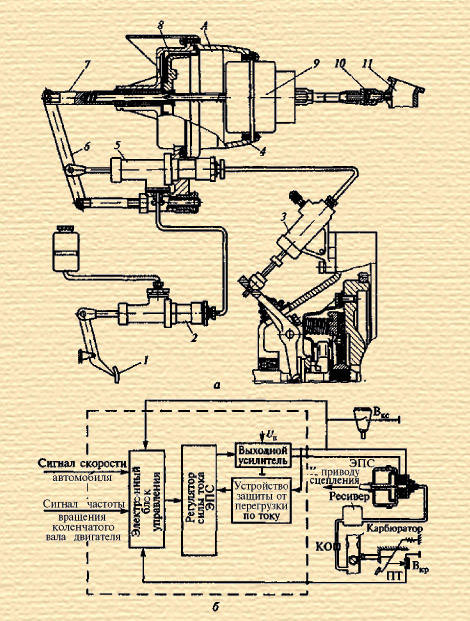
Структурная схема системы комплексного управления трансмиссией автомобиля Исполнительный механизм привода сцепления Электровакуумный исполнительный механизм привода сцепления разработан с учетом возможности его установки в гидравлический привод механизма легкового автомобиля любой модели.
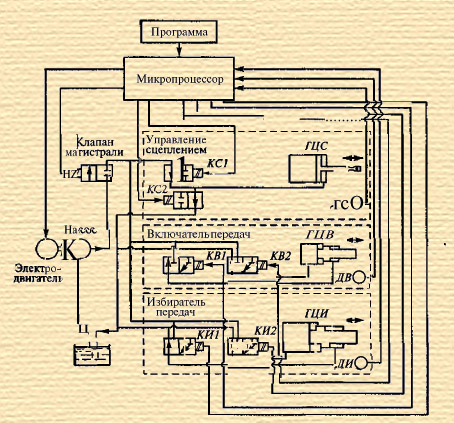
Исполнительный механизм привода выключения сцепления (а) и схема (6) его системы управления (разработка НАМИ): Автоматизация переключения передач Для механических ступенчатых коробок передач используют исполнительные механизмы, реализующие двух- или одноэтапный процессы переключения. В Японии, например, фирма «Исузи» разработала микропроцессорную систему управления NAVI-5, которая устанавливается по заказу на пятиступенчатую коробку передач автомобиля «АСКА». Система обеспечивает двухэтажный процесс переключения. В исполнительном механизме переключения используется давление жидкости для работы гидроцилиндров, перемещающих ползуны с вилками переключения передач. Для этого автомобиль оборудован гидронасосным агрегатом.
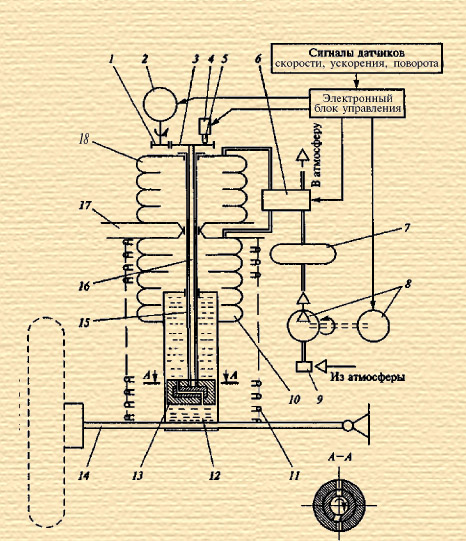
Схема управления комплексом исполнительных механизмов для автоматического управления переключением передач: Управление подвеской Автоматизация управления подвеской позволяет повысить не только комфортабельность салона автомобиля дня водителя и пассажиров, но и безопасность движения. Это достигается введением в подвеску исполнительных механизмов, управляемых с помощью электронных устройств, которые изменяют жесткость упругих элементов и сопротивление амортизаторов. Этим удается уменьшить крен кузова на повороте и его продольный наклон при разгоне и торможении. Разработаны устройства, обеспечивающие горизонтальное положение кузова при движении по неровным дорогам. Автоматически управляемые подвески позволяют регулировать высоту кузова автомобиля. Это важное свойство, так как высота кузова при изменении нагрузки на автомобиль влияет на безопасность движения. Положение кузова по высоте регулируется пневматическими упругими элементами. Сопротивление амортизаторов регулируется путем изменения проходного сечения отверстий, через которые жидкость из надпоршневой полости перетекает в подпоршневую, поскольку сопротивление амортизаторов зависит от скорости перемещения поршня. Управление жесткостью подвески реализуется в основном в пневматических или гидропневматических подвесках, но в большинстве случаев эту функцию вводят в комплексе с системой управления высотой кузова и сопротивлением амортизаторов, так как используются одни и те же датчики и исполнительные устройства.
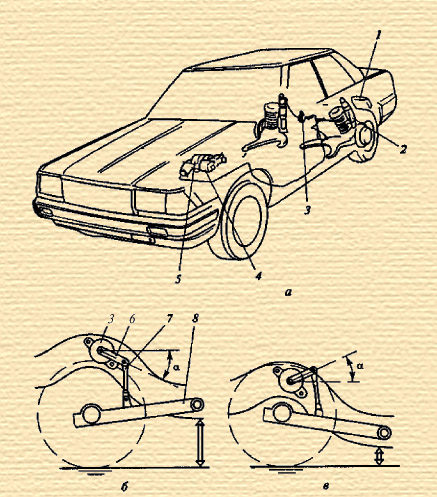
Установка элементов управления подвеской в автомобиле (а) и изменение позиции привода датчика при деформации упругих элементов подвески и перемещении кузова вверх (б) и вниз (в): Принцип регулирования сопротивления амортизатора, жесткости подвески и высоты кузова на примере одного колеса.
Схема автоматического регулирования подвески Регулирование жесткости подвески достигается изменением производительности перепускного клапана, а изменение высоты кузова осуществляется подкачиванием пневмокамеры от компрессора или выпуском воздуха из нее в атмосферу, что позволяет растягивать или сжимать основную пневмокамеру 10. Управление антиблокировочшй тормозной системой Путь торможения зависит не только от скорости движения, но и от коэффициента сцепления шины с дорожной поверхностью, Естественно, эта зависимость сохраняется при создании в тормозной системе давления, достаточного для блокировки колес. После этого начинается их скольжение по дороге. Вследствие различных коэффициентов сцепления правого и левого колес автомобиля происходит занос при торможении. Сохранить устойчивость (прямолинейность) движения при торможении можно, если обеспечить такой режим торможения, при котором колеса не доводятся до блокировки, а движутся приблизительно с 20...25 %-м проскальзыванием. При этом коэффициент сцепления колеса с дорогой будет максимальным для данного состояния дорожного покрытия. Например, если при торможении правые колеса катятся по сухой дороге, а левые — по мокрой, то вследствие разных коэффициентов сцепления при одинаковом давлении рабочего тела во всех тормозных цилиндрах (камерах) те колеса, которые катятся по мокрой дороге, сблокируются раньше. Автомобиль начинает разворачиваться (заноситься) в сторону мокрого участка дороги, где колеса имеют худшее сцепление. Предотвращают занос автомобиля путем регулирования тормозных сил, т.е. давления в рабочих колесных цилиндрах (камерах) у каждого колеса в отдельностй так, чтобы у всех была 20...25 %-е проскальзывание независимо от начального коэффициента сцепления с дорогой, который в процессе торможения будет максимальным для каждого колеса. В антиблокировочной тормозной системе, обеспечивающей управление процессом торможения всеми колесами раздельно друг от друга, анализируется частота вращения каждого колеса в отдельности. В процессе торможения, когда увеличивается давление в рабочих колесных цилиндрах (камерах), частота вращения колес уменьшается. При ее снижении ДО значения, граничащего с блокировкой (точнее, до 20...25 %-го проскальзывания), давление в рабочих цилиндрах понижают, и колесо начинает разгоняться. После этого давление вновь повышают, вызывая уменьшение частоты вращения. Затем процесс повторяется. За каждый цикл повышения-снижения давления В тормозной, системе угловая скорость колес, а следовательно, и линейная скорость автомобиля понижаются с наибольшей эффективностью определяемой сцепными силами колес с дорогой. Процесс торможения-растормаживания в пневматической тормозной системе осуществляется с помощью электромагнитного клапана-модулятора, управляемого электронной антиблокировочной системой (АБС). Команда включения АБС задается водителем резким нажатием на педаль тормоза. В дальнейшем усилие на педали может не меняться, модуляция (пульсация) давления в тормозной системе не зависит от водителя до тех пор, пока педаль тормоза нажата. Электронная система управления АБС.
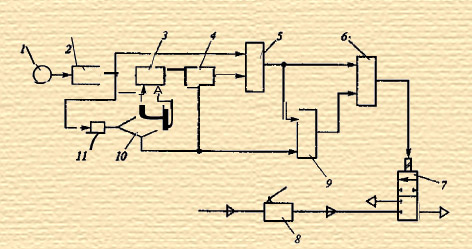
Структурная схема управления тормозной АБС (показан фрагмент для одного колеса): Антиблокировочная система для автомобилей с гидравлическим приводом тормоза (например, разработка фирмы «БОШ»).
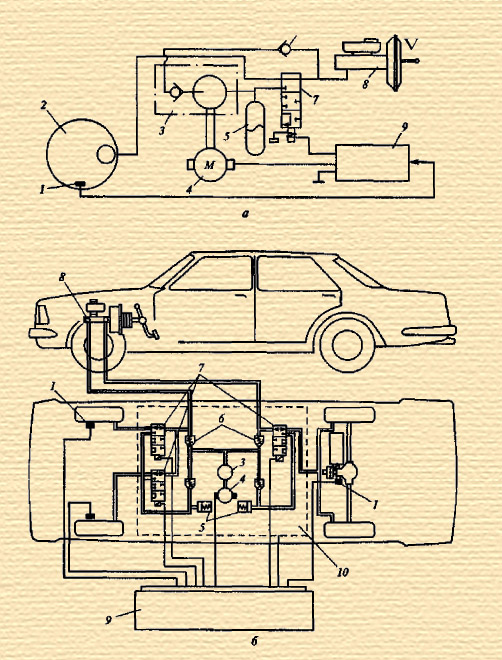
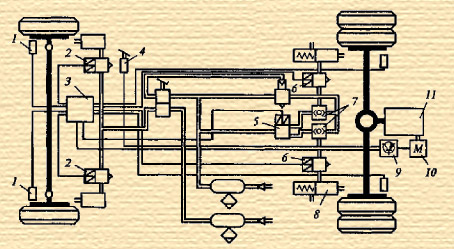
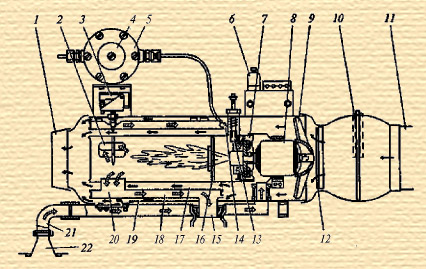
Антиблокировочная система «БОШ» (а) и схема ее установки на автомобиле с гидравлическим тормозным приводом (б): Основное препятствие для массового внедрения АБС на автомобилях с гидравлическим приводом тормозов — необходимость установки дополнительного энергоемкого гидронасосного агрегата для обеспечения пульсации давления тормозной жидкости на заданном уровне. Отказаться от него позволяют новые разработки АБС, например система Волгоградского технического университета (под руководством проф. А. А. Ревина), использующая кинетическую энергию тормозящего автомобиля для управления давлением в рабочих тормозных цилиндрах. Такая АБС получила название рекуперативной.
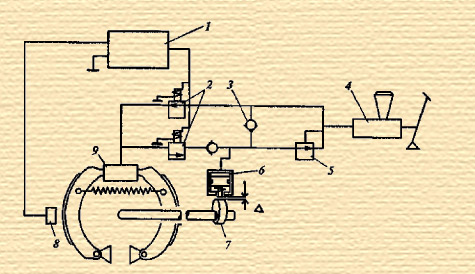
Рекуперативная тормозная АБС: 1 — блок управления; 2 — клапаны; 3 — обратный клапан; 4, 6 и 9 — соответственно главный, расширительный и рабочий цилиндры; 5 — клапан ограничения давления; 7 — кулачок; 8 — датчик
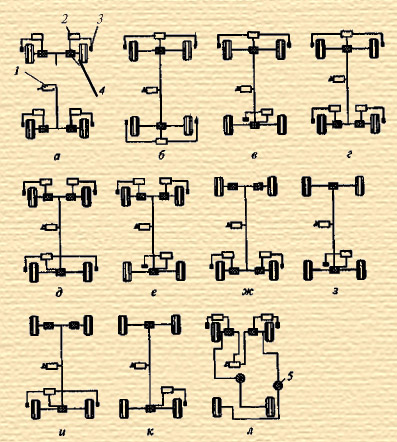
Структурные схемы АБС: Что такое АБС и схемы установки смотрите здесь Противобуксовочная система Назначение противобуксовочной системы (ПБС) — предотвращать пробуксовку колес (одного или нескольких) при движении в тяговом режиме на дорогах с малым коэффициентом сцепления. Задача ПБС во многом сходна с задачей АБС: поддержание скольжения колес в режиме тяги на уровне, обеспечивающем максимальное значение коэффициента сцепления в продольном направлении. Качество работы ПБС оценивают по ширине диапазона регулирования относительного скольжения. Узкий диапазон регулирования позволяет оценить эффективность ПБС еще и по такому критерию, как достигнутая скорость при трогании с места за установленное время на скользкой дороге. Противобуксовочная система в какой-то мере эквивалентна блокировке дифференциала, однако последняя имеет существенное преимущество, так как не изменяет тяговый момент на колесах. ПБС действует автоматически при необходимости на любой дороге, в то время как при блокировке дифференциала в случае движения на сухой дороге наблюдается сильное изнашивание шин. Наиболее эффективным признается наличие на автомобиле ПБС и устройства блокировки дифференциала. ПБС реализует свои возможности двумя способами: регулированием мощности двигателя (особенно для дизелей) и подтормаживанием ведущих колес или использованием обоих способов параллельно. ПБС фирмы «БОШ» для автомобилей с пневматическим тормозным приводом объединена с АБС.
Комплексная антиблокиовачная и противобуксовачная тормозная ситема фирмы «БОШ»: Из двух режимов работы ПБС подтормаживание осуществляется на скорости движения менее 30 км/ч. Такая низкая скорость выбрана для разгрузки тормозного механизма во избежание перегрева. Причем подтормаживание выполняется при пробуксовке только одного из ведущих колес. В случае пробуксовки обоих колес независимо от скорости движения, а также при пробуксовке одного колеса на скорости более 30 км/ч регулируется мощность двигателя. Командные сигналы в этом режиме формируются блоком 3 управления. Мощность двигателя уменьшается даже в том случае, если педаль топливоподачи нажата до отказа, т.е. приоритет отдается формированию команд для ПБС. Электроника в управлении вспомогательным оборудованием Приводные устройства К вспомогательному электрооборудованию относятся приборы: жизнеобеспечения и комфорта в кабине или кузове (кондиционеры, отопители, вентиляционное оборудование); обеспечения безопасности движения (очистители стекол и фар, звуковая сигнализация); навигационных и диспетчерских устройств (радиотелефонная связь, картографические маршрутные компьютеры, устройства документирования режимов движения, тахографы) и др. В большинстве приборов вспомогательного электрооборудования используют в качестве приводных исполнительных устройств электродвигатели, реже — электромагниты. Стеклоочистители Стеклоочиститель предназначен для механической очистки ветрового стекла, а в некоторых моделях автомобилей — также заднего стекла и стекол фар. Наиболее распространены электрические стеклоочистители.
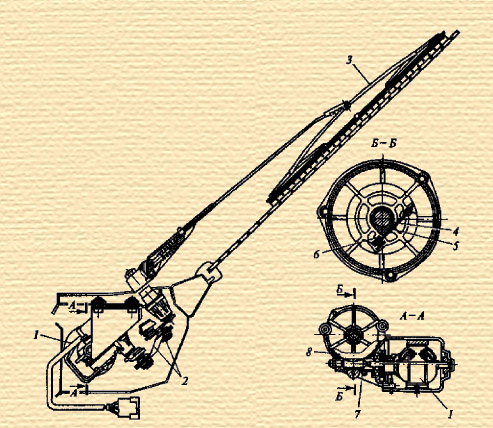
Типовой электрический стеклоочиститель: Для обмыва ветрового стекла в дополнение к стеклоочистителю устанавливают стеклоомыватель
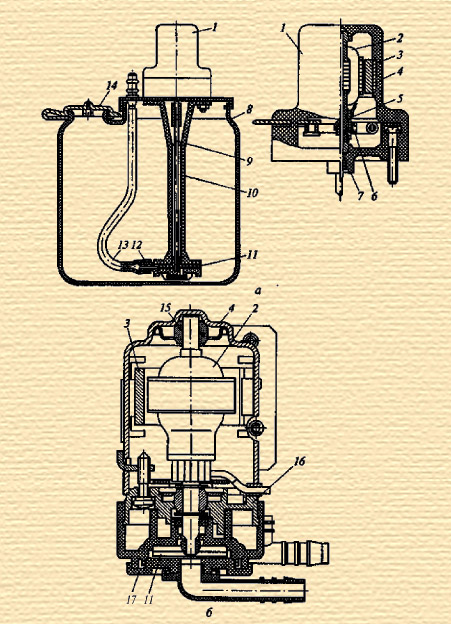
Насосное оборудование стеклоомывателей: Управляет работой стеклоочистителя и стеклоомывателя специальное реле, обеспечивая их прерывистую работу.
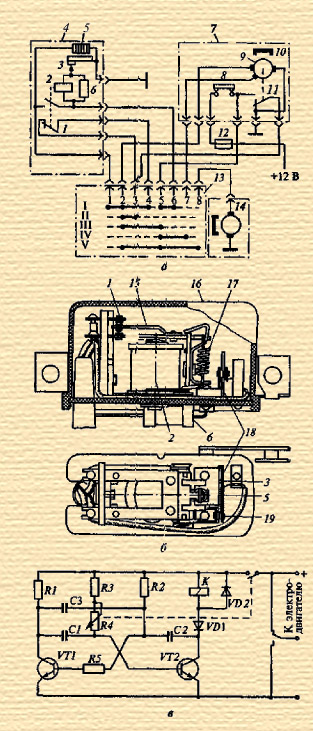
Электрические схемы и конструкция устройств управления стеклоочистителем: а — схема управления с помощью теплового реле; б— конструкция с тепловом реле; в — транзисторная схема управления на базе мультивибратора; 1— контакты; 2 — электромагнитное реле; 3 — биметаллическая пластина; 4 — oпоpная плата; 5—обмотка; 6—резистор; 7 — контактная группа в редукторе электродвигателя стеклоочистителя; 8 — предохранитель; 9 — электродвигатель привода щеток; 10 — постоянный магнит; 11 — концевой выключатель; 12— плавкий предохранитель; 13 — переключатель; 14— электродвигатель стеклоомывателя; 15— якорь реле; 16 — крышка; 17— возвратная пружина; 18— стойка; 19 — контакты; 1—8 — номера контактов; I—IV — позиции управления скоростью движения щеток стеклоочистителя; V — включение насоса стеклоомывателя; Rl—R5 —резисторы; С1—СЗ —конденсаторы; VD1 и VD2 —диоды; VT1 и VT2— триоды; К — реле Кроме электромеханических устройств управления режимом работы стеклоочистителя на многих автомобилях зарубежных фирм применяют электронные регуляторы на транзисторах, обеспечивающие плавное регулирование частоты циклов работы. Задатчиком частоты служит, как и в прерывателях сигнализатора поворота, астабильный мультивибратор. Для автомобилей «Трабант» и «Вартбург» используют регуляторы на основе стандартной схемы мультивибратора. Для очистки стекол (рассеивателей) фар используют щеточный или струйный фароочиститель. Щеточный фароочиститель по устройству и принципу действия не отличается от электромеханического стеклоочистителя. В струйном фароочистителе отчистка выполняется струей жидкости от форсунок, установленных под фарами (иногда на бампере). Для автоматического включения стеклоочистителя при загрязнении ветрового стекла применяют фотоэлектрические анализаторы степени загрязнения, связанные с реле управления стеклоочистителем. Оптическую систему фотоэлектрического анализатора устанавливают внутри салона на ветровом стекле вблизи зеркала заднего обзора. Она состоит из светоизлучателя 3 и фотоприемника 13.
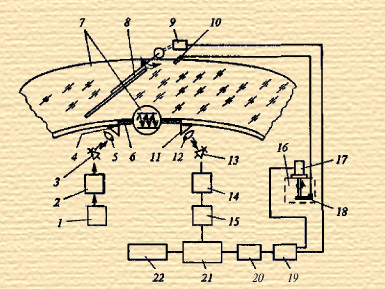
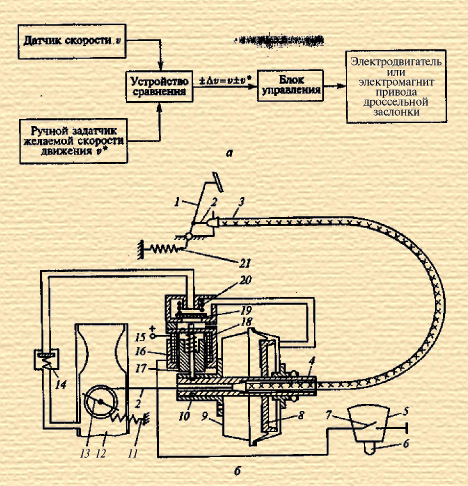
Принцип действия системы автоматического управления стеклоочистителем: Управление агрегатами автомобиля Устройство управления топливоподачей — спидостат используют для поддержания постоянства скорости движения. Эта функция выполняется при введении в электрическую схему отрицательной обратной связи, реализуемой с помощью датчика скорости автомобиля. При программном управлении спидостат является исполнительным механизмом для автоматического дистанционного регулирования топливоподачи.
Структурная схема устройства для автоматического поддержания заданной скорости автомобиля (а) и электровакуумный исполнительный механизм управления топливоподачей двигателя (б): Устройство работает совместно с системой автоматического управления сцеплением. Такая комплексная система обеспечивает возможность переключения передач без использования педали топливоподачи. Автоматика в управлении тепловыми вспомогательными системами Электрооборудование системы кондиционирования воздуха Под кондиционированием понимают подогрев и охлаждение воздуха, а также удаление из него влаги. Достигается это направлением воздушных потоков, циркулирующих в салоне, через теплообменники — нагреватели и охладители, которые часто располагаются в одном корпусе.
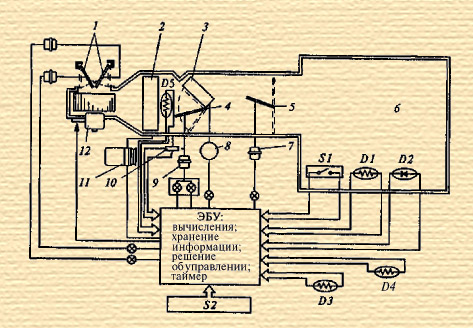
Схема принципа действия автомобильного кондиционера: Система отопления Независимая бензиновая система отопления фирмы «Эберспехер».
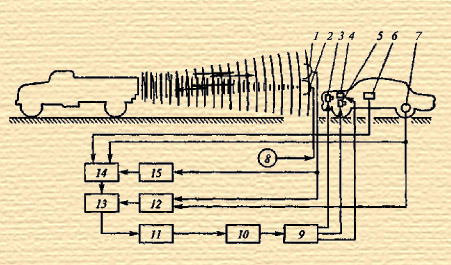
Независимая бензиновая система отопления салона (кабины) автомобиля: Электроника в системе предотвращения столкновений автомобилей Система управления скоростным режимом движения функционирует на основе информации об относительных координатах транспортных средств. Эта система, как и водитель, должна принимать решения на основе анализа дорожной обстановки. Такая система получила название системы предотвращения столкновений автомобилей (СПСА). В основе критерия функционирования СПСА лежит дистанция безопасности до препятствия, т.е. то минимальное расстояние до препятствия движению (в частности, до лидирующего автомобиля), при достижении которого в случае наличия относительной скорости должно быть начато торможение. При этом торможение должно осуществляться с замедлением (реализация которого возможна при данной скорости движения и реально существующем сцеплении шин с дорожным покрытием), обеспечивающим остановку управляемого автомобиля без опасности столкновения с препятствием. Логическая последовательность рабочего процесса СПСА складывается из следующих операций: обнаружение потенциально угрожающего объекта на пути движения; измерение дистанции до угрожающего объекта; измерение скорости угрожающего объекта; измерение собственной скорости автомобиля, оборудованного СПСА; расчет дистанции безопасности на основе данных о возможных тормозных путях управляемого и лидирующего автомобилей с учетом сцепных свойств шин с дорожным покрытием; сравнение расчетной дистанции безопасности с действительной дистанцией между управляемым автомобилем и препятствием движению; выявление необходимости изменения режима движения; определение момента времени, когда должно быть начато изменение режима движения; формирование сигнала водителю о начале изменения режима движения. Поскольку опасность представляет только сближение, то ответным действием водителя должно быть снижение скорости путем торможения только двигателем, совместного торможения двигателем и тормозами или только тормозами, а для автобусов и большегрузных автомобилей — еще и использованием тормоза-замедлителя. Такая последовательность операций при подготовке информации для водителя осуществляется в индикаторных СПСА. В автоматизированной СПСА изменение режима движения осуществляется исполнительными механизмами, управляемыми через селектор команд от бортового компьютера в случаях, если водитель к нужному моменту не предпринял никаких действий. Автомобиль оснащается средствами искусственного (технического) зрения. В качестве устройств технического (искусственного) зрения используют радиолокаторы, ультразвуковые локаторы, оптические лазерные или телевизионные локаторы. Наиболее распространены радиолокационные СПСА.
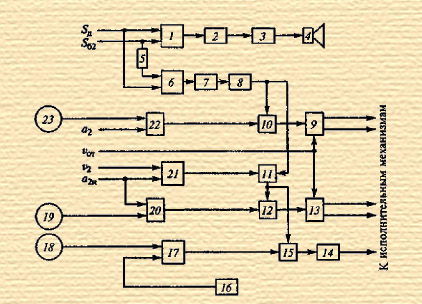
Локаторная система предотвращения столкновения автомобилей: Задачу распределения сигналов бортового компьютера для включения в работу отдельных исполнительных механизмов или всех вместе в определенной последовательности выполняет блок логики (селектор). В нем формируются дискретные сигналы для управления электромеханическими элементами: подача сигнала водителю при достижении предельно допустимой безопасной дистанции с учетом времени реакции водителя; подача командного сигнала на торможение двигателем, если водитель не предпринял никаких действий, а дистанция безопасности сократилась до значения, достаточного для срабатывания системы автоматического торможения; подача командного сигнала на совместное торможение двигателем и тормозными механизмами, если замедление при торможении двигателем не обеспечивает предотвращения столкновения; подача командного сигнала на выключение сцепления (для автомобиля с механической трансмиссией), если при совместном торможении частота вращения коленчатого вала двигателя снизилась настолько, что совместное торможение не обеспечивает максимальной эффективности, а также возникает опасность остановки двигателя.
Структурная схема устройства распред ел ения команд управления исполнительными механизмами:
|
Copyright MyCorp © 2024 |
| Создать бесплатный сайт с uCoz |